 Success-Plan Services
Success-Plan Services3 min read
I/ITSEC 2023: Transforming Training and Simulation
Some people set their holiday seasons to certain traditional events. For some, Thanksgiving is the kick off of the final stretch to the Winter break....
Read more ⇢
|

3 min read
Some people set their holiday seasons to certain traditional events. For some, Thanksgiving is the kick off of the final stretch to the Winter break....
Read more ⇢
5 min read
The convergence of Operational Technology (OT) and Informational Technology (IT) has become a strategic imperative for organizations aiming to unlock...

4 min read
Meet New RTI Team Member Marcos Rivera! Work environments around the globe have changed as a result of the recent pandemic, and the structure of...

6 min read
Part 6 of the JADC2 Blog Series We welcome guest blogger Alison Buchanan, Director, Communications at David Pratt & Associates Colin Gray once...

3 min read
The automotive industry is experiencing a transformative shift as it advances toward software-defined vehicles (SDVs). With the integration of...
3 min read
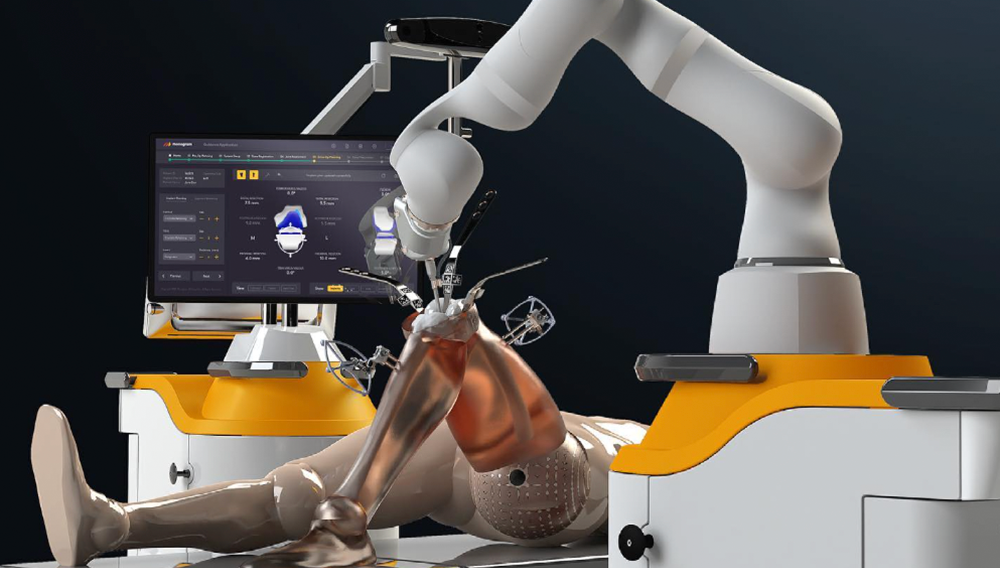
The recent Monogram Orthopedics telesurgery demonstration, in which a surgeon was able to operate on a model from 2,700 km (1,700 miles) away, was a...

5 min read
**Please note that with the April 2024 release of Connext Professional 7.3 LTS, the functionalities formerly comprising Connext Secure are now...

3 min read
Announcing RTI Connext® 7.2, the latest feature-packed release of our software framework.

8 min read
Part 5 of the JADC2 Blog Series “Data is wild” —Mark C. Kitz - PEO C3T (former PEO IEW&S) at TechNet Augusta 2023
